FIXED ROBOT ARMS
Industrial robot arms allow flexible positioning of different sensor technologies on complex geometry samples.
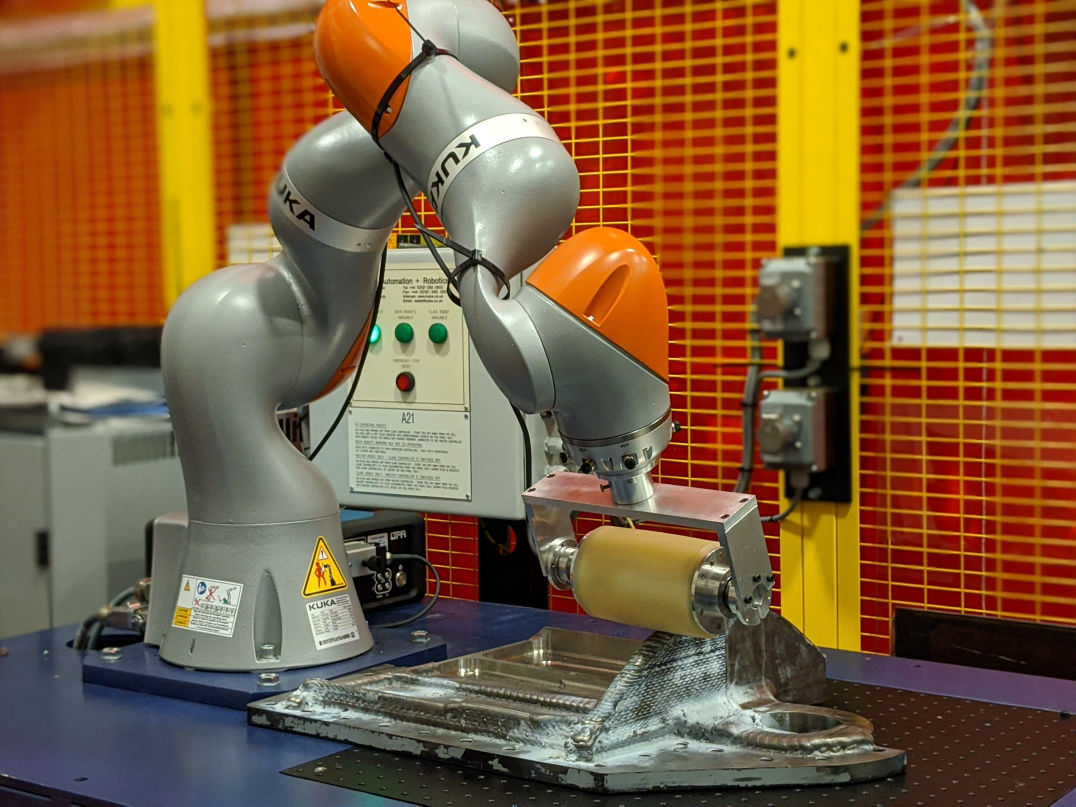
Here we see a KUKA KR90 robot used to make ultrasonic phased array measurements on an aerospace wing cover sample.
Read More